Videos

A Framework for Real-time and Personalisable Human Ergonomics Monitoring

An Online Method to Detect and Locate an External Load on the Human Body

A Collaborative Robotic Approach to Autonomous Pallet Jack Transportation and Positioning

Towards an Intelligent Collaborative Robotic System for Mixed Case Palletizing

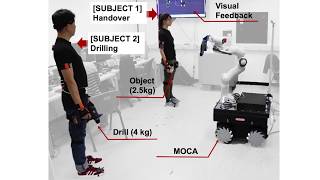
A MObile Collaborative Robot Assistant for conjoined huMAN-robot actions

Toward a Synergistic Framework for Human-Robot Coexistence and Collaboration

An Augmented Reality Interface for Improving ask Performance in Close-Proximity Teleoperation

A Teleoperation Interface for Loco-manipulation Control of MOCA
Towards Ergonomic Control of Collaborative Effort in Multi-human Mobile-robot Teams

A Capability-Aware Role Allocation Approach to Industrial Assembly Tasks

An Intuitive Augmented Reality Interface for Human Robot Collaboration

Towards Robot Interaction Autonomy: Explore, Identify, and Interact

A New Overloading Fatigue Model for Ergonomic Risk Assessment with Application to HRC

Research activities of the HRI2 Laboratory: A Summary

A Self-Adaptive Robot Control Framework for Improved Tracking and Interaction Performances in Low-Stiffness Teleoperation

The First Ergonomic and Dynamically Reconfigurable HRC framework

Robots Learning from Robots: A Proof of Concept Study for Co-Manipulation Tasks

Towards Ergonomic Control of Human-Robot Co-Manipulation and Handover

Integrating Wearable Haptics and Teleimpedance Methods for Augmented Human-Robot Interaction

Robot Adaptation to Human Physical Fatigue in Human-Robot Co-Manipulation

Soft Brain-Machine Interfaces for Assistive Robotics: A Novel Control Approach

Anticipatory Robot Assistance for the Prevention of Human Static Joint Overloading in HRC

Derivation of Robot Task-Frame Control Authority from Repeated Sensory Observations

Adaptation of Robot Physical Behaviour to Human Fatigue in Human-Robot Co-Manipulation

Towards Multi-Modal Intention Interfaces for Human-Robot Co-Manipulation

Reduced-Complexity Representation of the Human Arm Active Endpoint Stiffness for Control of Remote Manipulation

Reflex Control of Robotic Hands during Object Slippage

Dimensionality Reduction in Arm Endpoint Stiffness Representation: Application to Teleimpedance Control

Special Event Video

Special Event Backstage Video

Soft Espresso using softhand teleimpedance!

Teleimpedance Control of a Synergy-Driven Anthropomorphic Hand
Human-Like Impedance and Minimum Effort Control for Natural and Efficient Manipulation

TeleImpedance (Kernel Model): Ball Reception Experiments
Teleimpedance: Peg-in-Hole Experiment